Hoe je een Fpv drone kan maken en programmeren

Uitleg van de werking van de onderdelen
Frame: Het frame die meestal is gemaakt van carbon fiber die bepaald de vorm van de drone. Daar op moet je alle onderdelen vast makken. Er bestaan verschillende type Drone Frames, bijvoorbeeld een quadcopter heeft 4 armen, Hexacopter die heeft 6 armen, tricopter heeft 3 armen, octocopter die heeft 8 armen, er zijn nog veel meer frames.
Motors: Bij alle drone zit een motor aan het uiteinde van de drone die zorgen dat de propellers kunnen draaien. Wanneer je een motor koop staan er specificatie op het motoren, zo kun je kijken welke onderdelen (ESC, flight controller) je kan gebruiken met de motoren. De motoren kun je in verschillende modellen vinden, van klein naar groot, duur en goedkoop, met merk en er zijn ook drones motor die geen merk hebben. Voor grote motoren heb je natuurlijk een groter frame nodig doordat het een grotere draagkracht vormt door de grote propellers. En het omgekeerde geldt voor de kleine drones. Bij het kiezen van een motor staat er 4 nummers achter de KV op de motor geschreven. Dat getal geeft de snelheid van de motor aan. Hoe hoger het getal, hoe meer rotaties per minuut de motor maakt indien de motor 1 V (volt) in voeding krijgt.
ESC: De esc geeft de motoren aan hoe hard het moet draaien. Dit is belangrijk omdat alle motoren moet even hard draaien. Voor elke motors gebruik je 1 ESC of kan je een 4in1 esc gebruiken.
Flight controller: Een kan je vergelijken als de hersens van de drone. Daar op moet je alle onderdelen (camera, vtx, motoren, accuconnector, ESC en nog veel meer) vast solderen. In de flight controller zit, er ook een IMU ingebouwd, dit zorgt dat de stabiel in de lucht kan vliegen.
Accu: Voor de accu gebruik men het meest de lipo batterij omdat bij het vliegen van een drone biedt het lipo de benodigde stroom om alle elektronische componenten te laten functioneren en het heeft een relatief lage gewicht.
Vtx: De videozender, ook wel vtx genoemd, die is verantwoordelijk dat de video van de Fpv camera draadloos naar de Fpv bril wordt gestuurd. De enige functie van de vtx is het sturen van de video naar de camera en het functioneert onafhankelijk van de camera of de camera of de instellingen daarvan.
(Dit betekent dat de VTX geen invloed heeft op de beeldkwaliteit of andere instellingen van de camera. De camera en de VTX zijn twee afzonderlijke componenten die samenwerken om video te verzenden, maar ze functioneren onafhankelijk van elkaar.)
Camera: De camera gebruik je om voor aan de drone te kunnen zijn met behulp van de Fpv bril.
Antenne: Die heb je nodig voor het verzenden van het signaal tussen je vtx en camera, vtx met Fpv bril en de ontvanger met de zender.
Fpv bril: Deze kan je gebruiken om voor aan de drone te kunnen zien. Omdat je kan ook een Fpv screen gebruiken of je kan de drone in gezichtsveld vliegen.
Propellers: Verminder het gewicht en het aantal rotaties per minuut.
Receiver: Het werk van de receiver is op het signaal van de zender naar de flight controller te sturen.
Zender: De zender stuurt een signaal naar de ontvanger (receiver) die zit aan de flight controller op de drone bevestigd.
Bij de analoog bril is de kwaliteit niet de beste, maar het heeft een lage latentie. Dit verwijst naar een minimale vertraging in de verwerking van computergegevens via een netwerkverbinding. Hoe lager de verwerking latentie, hoe dichter echte tijd toegang wordt benaderd.
Bij de digitale bril krijg je een mooier beeld, maar het heeft hoge latentie, wat je dan ziet, is dat er een sprong op je scherm is. De reis naar de vtx en terug duurt langer. Vertraging staat bekend als input lag.
Er zijn twee type signalen digitale en analoog

1. Frame in elkaar zeten
Voor dat gaan beginnen met solderen moet je als eerste het frame in elkaar zetten.
Om het frame in elkaar te zetten, begin u eerst de armen en de armvergrendeling bovenop de bodemplaat te zetten.
Bevestig de bodemplaat met druk moeren op de armen met schroeven vanaf de onderkant. Plaats daarna de acht aluminium af standhouders.
De stappen om een FPV-drone te kunnen maken

2. Motoren bevestigen
Nu moet je de 4 motoren aan elke uiteinde van elke arm aan het frame bevestigen. Ik geef je als tip om schroefdraadborging aan schroeven te zetten zodat als er vibratie van de motoren is zullen ze niet los komen. Maar als de schroeven die komen met je frame all schroefdraadborging moet je er niet extra schroefdraadborging zetten.
Ook wanneer je schroefdraadborging gaat kopen altijd de blauwe type omdat die rode is permanent maar als je die rode gebruikt moet je de schroeven op hitten om ze los te maken.

Let op dat je de juiste schroeven gebruik om de motoren aan de arm te bevestigen zorg er voor dat ze niet te lang zijn dat ze de motorwikkelingen niet aan raken!

3. Bedrading diagram
Deze gebruikt je wanneer je een analoog camera heb.

Deze gebruikt je wanneer je een digitale camera heb.

Voordat je draden soldeert, kun je alle componenten in het frame “droog passen”. Dit proces stelt je in staat om draadlengtes te meten, de plaatsing van componenten te bepalen en eventuele problemen met de afstand te identificeren.
4. Installeer de ESC en flight controller
Vervang de vier kortere schroeven die aan het frame zijn bevestigend met de langere schroeven die je in het pakje met M3 schroeven kan vinden.

Maar als voor dat je een flight controller koopt, zorgt dat je een pakje van M3 schroeven ook koopt van verschillende lengtes.

Nu schuif de 4 in 1 ESC en flight controller board tussen de schroeven, en zorg ervoor dat de batterij stroompads van het ESC-bord naar achteren wijzen en de motorsoldeerpads naar boven.
De herkenning van de voorkant van het frame is mogelijk door te letten op de uitsparingen die zijn bedoeld voor de montageplaten van de camera.
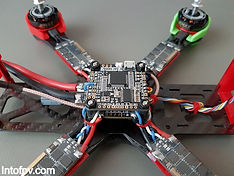
Dubbel check dat de ESC en de flight controller niet het frame aanraakt omdat het kan een kortsluiting veroorzaken.

Controleer de benodigde lengtes van de motordraden, laat wat ruimte over en knip ze op maat. Bevestig de draden van de motoren aan de armen met behulp van 2 mm lage zip ties of elektrische tape.

Snijdt ongeveer 2 mm van de uiteinden van de draden en soldeer de uiteinden vervolgens.
Nu soldeer de 3 draden die je heb 2 mm af heb geknipt aan de vier plekken van links naar rechts of van rechts naar links maar in deze volgorde op de ESC. En soldeer de + rode en - zwarte batterij kabels en een 1500uF capacitor aan ESC waar je ook de batterij kabels moet solderen.

5. Soldeer de connector aan de flight controller
Soldeer (rode + en zwarte -) kabels aan de Xt60 connector en dan soldeer die twee kabels weer aan de + en - padden op de flight controller volgens de instructie diagram.
Controleer dan je de kabels op de juiste plek heb gesoldeerd!

Dan moet je het signaal kabel die samen met ESC kom moet je van de ESC aan de flight controller connecteren of solderen volgens de instructie diagram.

Als er geen rubberen doorvoertule al aan de flight controller is gezet moet je ze zelf zetten.

Wanneer je alle onderdelen in correcte plek volgens de instructie diagram heb gesoldeerd dan kun je de flight op de ESC tussen de 4 schroeven schuiven.
En controleer dat de pijl op de flight controller aan de voorkant van de drone wijst!

6. Installeer de analoog systeem of digitale systeem met de camera
Installeer de analog camera in de carbon fiber camerabevestiging met twee schroeven.

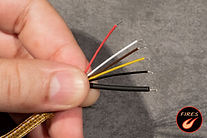
Zet dan de camerabevestiging in het frame en snijd de camera kabels met genoeg lengte zodat je de gele, rode, en zwarte volgens de instructie diagram aan de flight controller soldeert.
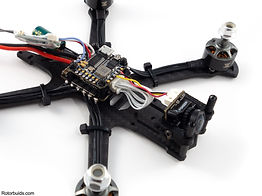
Nu pak de vtx en zet dubbelzijdig tape onder het zo je het op het frame kan vast plakken. Als tip maak ook de vtx vast met twee van de 2 mm lange zip ties zodat het vtx zeker niet los gaat.
Vervolgens moet je de kabels van de vtx aan de flight controller solderen en doe dat volgens de instructie diagram.
Connecteer de vtx antenne aan de vtx als je dat niet doet, heeft het een grote kans dat er een kortsluiting in de vtx kan veroorzaken wanneer u de batterij aan de flight controller connecteert!
Maak de vtx antenne vast aan achter afstandhouder of onder het carbon fiber top plaat.


7. Installeer de Ontvanger
Soldeer de ontvanger kabels volgens de instructie diagram aan de flight controller.

Bevestig de ontvanger antennes met hun kabels aan de onderkant van de armen met de 2 mm lange zip ties.

8. Controleer de onderdelen
Voor dat je de flight controller aan de Lipo batterij gaat connecteren moet heel goed controleren dat er geen residu van de kleine soldeer tin tussen de elektrische onderdelen zit die een kortsluiting kunnen veroorzaken!
Om te controleren als er een kortsluiting is kun je multimeter op continuïteitsmodus dan als er een kortsluiting is hoor je een geluid. Dan moet je door de hele diagram gaan moet de dubbel check dat je alle kabels op de juiste plek heb gesoldeerd.

Ik aanbevelen je om in een rook stopper te investeren omdat het is meer handiger dan een multimeter en het zaal je veel geld besparen.

9. De zender aan de ontvanger verbinden
Als eerste moet je het knopje op je ontvanger indrukken terwijl je de stroom aansluit en gelijker tijd je transmitter in binding modus zet. De zender en ontvanger gaan dan met elkaar “praten”. Dat zie je doordat het klein rood licht op de ontvanger van rood naar groen kleurt. Dan is de ontvanger verbonden met de zender. (Deze Is een uitleg voor Flysky ontvangers)
De methode zaal anders zijn als je andere type zender gebruikt met andere protocollen, dan moet je model van je zender op YouTube zoeken een video-uitleg bekijken.


De stappen die moet volgen om je Fpv drone te kunnen programmeren
Je hebben alle onderdelen aan het frame bevestigd, en de drone gaat aan wanneer je de Lipo batterij aan de flight controller connecteert.
Nu moet je het drone programmeren, de software die je kan gebruiken is Betaflight.
Installeer de propellers nog niet!
Connecteer de Micro-USB aan de flight controller en de USB aan de computer
Stap 1: Je moet een Micro-USB-kabel hebben, dan connecteer die aan de flight controller en dan connecteer de USB aan je computer. Als je computer geen geluid maakt is je kabel niet goed gebruikt een andere. Dan click op de gele connect knop.
Als de knop rood wordt dat is je flight controller geconnecteerd met Betaflight.
Installeer de nieuwe firmware op de flight controller
Stap 2: Is een nieuwe firmware installeren op je flight controller, dat doe je als volgt. Ga
eerst even naar de "CLI" en type version en check welke type flight controller je heb. Druk op disconnect en druk op de firmware flasher. Dan druk op "Choose a Board" dan zoek de juiste naam van je flight controller. Dan druk op "Choose a Firmware version kies te bovenste, druk op "full chip erase" en druk op "load firmware" dan druk op "flash firmware".
Betaflight heeft alle data van je flight controller verwijderd en nu gaat je flight controller in DFU automatisch en Betaflight gaat de nieuwste firmware voor je installeren en duur ongeveer 20 t/m 30 seconde.
Maar als je flight controller niet in DFU wil gaan, is er op je flight controller een knopje als je die in druk, tijdens je die micro-USB in je flight controller zet Betaflight je flight controller in DFU automatisch.
Kalibreer de versnellingsmeter
Stap 3: Druk op "connect knop" zorg dat je Fpv drone op een tafel is gezet die even is. Ga naar de Setup tab druk vervolgens op "calibrate accelerometer".
Je kunt Betaflight hier installeren
Configureer de "smart audio" en ontvanger
Stap 3.1: Hier moet je "smart audio" en ontvanger configureren. Voor de ontvanger en ga naar Ports tab en schakel "Serial RX" aan voor de UART die de ontvanger op je flight controller is aangesloten.
En druk daarna op de Receiver tab en selecteer de "Serial (via UART) in de Ontvanger gedeelte en kies het protocol van je ontvanger in het gedeelte van "Serial Receiver Provider".
Voor de "smart audio" druk op Ports tab dan schakel "TBS Smart-audio" in druk vervolgens op "Save en Reboot".
Schakel "auto Connect" aan zodat je niet telkens de "connect" knop moet drukken.
Copy en paste de codes in de CLI-tab
Stap 3.2: Ga naar CLI-tab en copy en paste deze codes daar in, zo kun je instellingen veranderen binnen de OSD-menu in de vtx via je Fpv bril door de twee joystick van je zender in de richting van rode pijlen te bewegen.
Maar als je een ander type vtx gebruik kun je de codes hier vinden.

Wanneer je die twee joystick beweegt, krijgt je een OSD-menu in je Fpv bril en doe als volg.
Selecteer de "Feature" optie door je thortle naar benden en vervolgens naar rechts te bewegen.

Je zult de "FEATURES" menu nu zien.

Je zult de "VTX SA" menu nu zien.
Selecteer de "VTX SA" optie door je thortle naar benden en vervolgens naar rechts te bewegen.

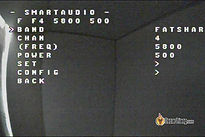
Nu zaal je "SAMRTAUDIO" menu zien je bent bij de vtx instellingen gekomen.
Selecteer de "BAND","CHAN" (Kanaal), of POWER optie als je ze wilt veranderen door je thortle naar benden en vervolgens naar rechts te bewegen.
En om alle instellingen te bewaren selecteer je "SET" en dan selecteer je "Confirm"
Selecteer de instellingen die je wil in de OSD-menu
Controleer als de ontvanger goed functioneert
Stap 4: Controleer vervolgens of de ontvanger correct functioneert op het "Receiver" gedeelte. De balken (kanalen) moeten bewegen wanneer je de sticks op de zender beweegt. Als de verkeerde kanalen reageren, probeer dan een andere kanaalconfiguratie, zoals "standaard (AETR)" of "TAER"."

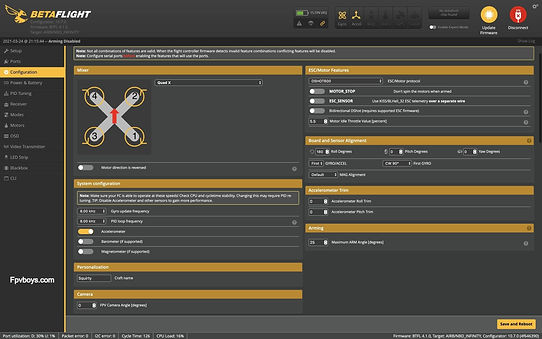
Configureer de motoren
Stap 5: Druk op de configuration tab en ga naar de "ESCMotor Features" gedeelte kies voor "DSHOT600" en voor de "Motor Idle Throttle value [procent]" kies voor 5.5.
Bij de Arming modus verander de 25 voor 180 zodat je "Turtle" modus kan gebruiken.
In het kort "Turtle" modus zorgt er voor dat je met behulp van de schakelingen op je zender je drone motoren achteruit kan laten draaien, dat gebruik om je drone om te keren als het ondersteboven is gevallen.
Scrol naar beneden en ga naar de "Other Features" gedeelte en schakel "AIRMODE","OSD","ANTGRAVITY" en DYNAMIC_FILTER aan. En druk op Save en Reboot.
Controleer dat de pijl die op de flight controller is in de juiste richting wijst!
Stap 6: Controleer dat de pijl op de flight controller aan de voorkant van de drone wijs dat kun je zien als je op de Receiver tab druk en op de Preview modus kijk.
Maar als je de drone beweegt en de flight controller niet in de juist richting wijs in Betaflight kun je de richting makkelijk bij de configuration tab via de Board and Secor Alignement modus aanpassen.

Typ de instelling voor de batterij
Stap 7: Druk op de Power & Batterij tab ga naar Batterij gedeelte en verander bij "Warning Cell Voltage" de 3.5 om naar 3.7 als je beginners dat zorgt ervoor om je een reminder te sturen door geluid te maken via je beeper die je aan je flight controller heb gesoldeerd.

Laat de instellingen die bij de "PID Tuning" tab zijn staan
Stap 8: Bij de PID-Tuning Tab als je beginner ben, aanbeveel ik je om alle Pids op default te laten staan.

Configureer de Modus aan de schakeling aan de zender
Stap 9: Bij de Modes tab daar kan kiezen welke schakeling op je zender voor je drone laat doen.
Omdat te kunnen configureren moet je op de "add Range" "ARM" knop drukken dan kies je een schakelaar het je het makkelijkst je linker weest vinger kan aan en uit schakelen.
Je moet die schakelaar dan even schakelen dan zaal Betaflight automatische de schakelaar detecteren en het weet precies welke schakelaar je heb bewogen.
Dan die je een gele balk en wanneer je die schakelaar omschakelt dan moet je een kleine gele punt zien. Als de gele balk overeenkomt met de gele stip, betekent dat dat de drone gaat "armen".
Dezelfde methode geld voor de andere modus die je wilt zetten.
De andere modus die je nodig moet hebben zijn: Angle modus, Horizon modus, Air modus en als laste de Flip over after crash (turtle modus).
Stap 10: Installeer je propellers nog niet!
Nu moet je bij de Motor tab drukken om je motoren te testen als ze in de juiste richting draaien.
Dat doe je zo connecteer je lipo batterij aan je flight controller en connecteer je micro-USB ook aan je flight controller.
In de Motor modus in Betaflight schakel de "I understand the riks" aan dan schuif de blauwe "Master" rondje een beetje naar boven. Als het goed is moet je motoren beginnen te draaien.
Je kunt het controleren door een stukje tape te zetten aan de top van de motor waar je de propeller moet plaats, dan kun je zien in welke richting de motoren draaien. En check ook dat elke motoren op de juiste nummer zitten.
Controleer de als de motoren in de juiste richting draaien


Maar in Betaflight 4.3 als je de motoren niet op in de juiste plak zit kun je het via software veranderen. Omdat te kunnen doen moet je de " I understand the riks" schakeling uit schakelen, vervolgens druk je op "Reorder motors". Je krijgt een melding dan druk je weer op "I understand the risks" druk op "start".
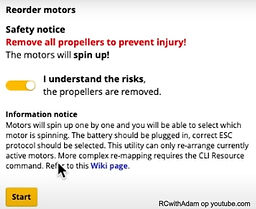
Je krijgt weer een melding onder in is geschreven ("Click on the spinning motor) doe dan voor elke motor.

Dan zegt het je onder in "Ready Check the motor spinning order by clinking on the image". Druk vervolgens op de save knop. Nu gaat Betaflight de drone resetten en alle data bewaren.
Druk nu terug op de motor tab en test als de motoren 1,2,3,4 op de juist plek zitten door de bij elke nummer de blauwe rondje een beetje naar boven te schuiven.

Maar als je motoren ook niet in de juiste richtingen draaien kun je het de motoren richting ook via Betaflight aanpassen.
Dat doe je zo ga naar de motor mixer gedeelte schakel de schakelaar aan en dan druk op "Save and Reboot".

Ga terug naar de Motor tab en schakel uit de " I understand the riks" Druk op de knop "Motor direction".
Je krijgt een melding dan druk je weer op "I understand the risks" druk op "Wirzard".

Je krijgt deze plaatje druk op "Start / spin motors".
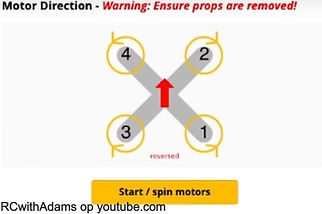
Dan zie je vervolgens dit plaatje doe wat er onder in is beschrijven ("Click on motor numbers individually to change spin direction Verify all motors are spanning correctly").

Wanneer je klaar bent druk op "close" en controller als alle motoren in de juiste richting draaien door een stukje tape te zetten aan de top van de motor waar je de propeller moet plaats, dan kun je zien in welke richting de motoren draaien.
Je kunt het zien door de blauwe "Master" rondje een beetje naar boven te schuiven.
Stap 11: Om je Drone build af te maken pak je vier nylon moeren en schroef je flight controller op esc.
De laatste stapjes om de drone klaar te maken

Stap 11.1: Installeer te carbon fiber top plat op het frame en schuif een batterij bevestiging ook er onder. Je kunt ook die "Ummagrip Sticky Battery Pad" op die top plaat vast plakken zodat je batterij niet tegen te schrijven gaat slepen en dat eb ook niet weg kan slippen.

Stap 11.2: Nu kun je uiteindelijk je vier propellers op de motoren plaatsen, maar let wel op dat je ze op de juiste plek zet.
Maak ze allemaal vast met de vier M5 moeren die samen met de motoren zijn gekomen.
Maar schroef ze niet te hard!

Je bent klaar om je eerste drone te kunnen vliegen, pak je zender en je Fpv bril en alle batterijen die je heb en ga naar buiten, raak wat gras aan en ga de wereld verkennen jongen of meisjes! 😉