Cómo hacer y programar un dron FPV

Explicación de cómo funcionan las piezas.
Marco: El marco que suele ser de fibra de carbono que determina la forma del dron. Tienes que arreglar todas las partes en él. Hay diferentes tipos de marcos de drones, por ejemplo, un cuadricóptero tiene 4 brazos, un hexacóptero tiene 6 brazos, un tricóptero tiene 3 brazos, un octocóptero tiene 8 brazos, hay muchos más marcos.
Motores: Todos los drones tienen un motor en el extremo del dron que asegura que las hélices puedan girar. Cuando compra un motor, hay especificaciones sobre el motor, por lo que puede ver qué partes (ESC, controlador de vuelo) puede usar con los motores. Los motores los puedes encontrar en diferentes modelos, desde pequeños a grandes, caros y baratos, con marca y también hay drones con motor que no tienen marca. Para motores grandes, naturalmente, necesita un marco más grande porque forma una mayor capacidad de carga debido a las grandes hélices. Y lo contrario es cierto para los drones pequeños. Al elegir un motor, hay 4 números escritos en el motor después del KV. Ese número indica la velocidad del motor. Cuanto mayor sea el número, más rotaciones por minuto realiza el motor si se alimenta con 1 V (voltio).
ESC: El esc le dice a los motores qué tan fuerte debe funcionar. Esto es importante porque todos los motores deben funcionar a la misma velocidad. Para cada motor usas 1 ESC o puedes usar un 4in1 esc.
controlador de vuelo: Se puede comparar con el cerebro del dron. Tienes que soldar todas las partes (cámara, vtx, motores, conector de batería, ESC y mucho más) en él. El controlador de vuelo también tiene una IMU incorporada, lo que garantiza que pueda volar de manera estable en el aire.
Batería: Para la batería, la batería lipo se usa con mayor frecuencia porque cuando se vuela un dron, la lipo proporciona la energía necesaria para que funcionen todos los componentes electrónicos y tiene un peso relativamente bajo.
vtx: El transmisor de video, también llamado vtx, que se encarga de enviar el video de la cámara Fpv de forma inalámbrica a las gafas Fpv. La única función del vtx es enviar el video a la cámara y funciona independientemente de la cámara o la cámara o su configuración.
(Esto significa que el VTX no afecta la calidad de la imagen ni otras configuraciones de la cámara. La cámara y el VTX son dos componentes separados que funcionan juntos para transmitir video, pero funcionan de manera independiente).
Cámara: Usas la cámara para estar frente al dron usando las gafas FPV.
Antena: Necesitas eso para enviar la señal entre tu vtx y la cámara, vtx con gafas Fpv y el receptor con el transmisor.
gafas FPV: Puedes usar esto para ver el frente del dron. Porque también puedes usar una pantalla Fpv o puedes volar el dron en el campo de visión.
hélices: Reducir peso y número de rotaciones por minuto.
Receptor: El trabajo del receptor es enviar la señal desde el transmisor al controlador de vuelo.
Transmisor: El transmisor envía una señal al receptor (receptor) que está conectado al controlador de vuelo en el dron.
Con las gafas analógicas la calidad no es la mejor, pero tiene una latencia baja. Esto se refiere a un retraso mínimo en el procesamiento de datos informáticos a través de una conexión de red. Cuanto menor sea la latencia de procesamiento, más cercano será el acceso en tiempo real.
Con las gafas digitales, obtienes una imagen más agradable, pero tiene una latencia alta, así que lo que ves es que hay un salto en tu pantalla. El viaje a la vtx y de regreso toma más tiempo. El retraso se conoce como retraso de entrada.
Hay dos tipos de señales digitales y analógicas

1. Monte el marco
Antes de comenzar a soldar, primero debe ensamblar el marco.
Para ensamblar el marco, comience colocando los brazos y la traba de los brazos en la parte superior de la placa inferior.
Fije la placa inferior con tuercas de presión en los brazos con tornillos desde la parte inferior. Luego coloque los ocho espaciadores de aluminio.
Los pasos para poder hacer un drone FPV

2. Confirme Motors
Ahora necesita conectar los 4 motores al marco en cada extremo de cada brazo. Mi consejo es poner fijador de roscas en los tornillos para que si hay vibración de los motores no se suelten. Pero si todos los tornillos que vienen con el marco están bloqueados con roscas, no debe ponerles un fijador de roscas adicional.
También cuando compras threadlock siempre el tipo azul porque el rojo es permanente pero si usas el rojo tienes que calentar los tornillos para aflojarlos.

¡Asegúrese de usar los tornillos correctos para sujetar los motores al brazo y asegúrese de que no sean demasiado largos para que no toquen los devanados del motor!

3. Diagrama de cableado
Usas esto si tienes una cámara analógica.

Usas esto si tienes una cámara digital.

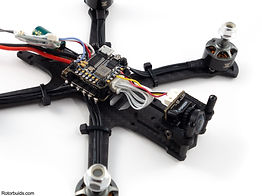
Antes de soldar los cables, puede "ajustar en seco" todos los componentes en el marco . Este proceso le permite medir la longitud de los cables, determinar la ubicación de los componentes e identificar cualquier problema de espacio.
4. Instale el ESC y el controlador de vuelo
Reemplace los cuatro tornillos más cortos que aseguran el marco con los tornillos más largos que se encuentran en el paquete de tornillos M3.

Pero antes de comprar un controlador de vuelo, asegúrese de comprar también un paquete de tornillos M3 de diferentes longitudes.

Ahora deslice el ESC 4 en 1 y la placa del controlador de vuelo entre los tornillos, asegurándose de que las almohadillas de alimentación de la batería de la placa ESC estén hacia atrás y las almohadillas de soldadura del motor hacia arriba.
Es posible reconocer el frente del marco prestando atención a los huecos destinados a las placas de montaje de la cámara.
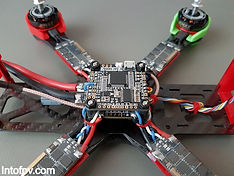
Vuelva a verificar que el ESC y el controlador de vuelo no estén tocando el marco, ya que puede causar un cortocircuito.

Compruebe las longitudes necesarias de los cables del motor, deje algo de espacio y córtelos a la medida. Conecte los cables de los motores a los brazos con 2 mm lage zip lazos o cinta aislante.

Corte unos 2 mm de los extremos de los cables y luego suelde los extremos.
Ahora suelde los 3 cables que cortó de 2 mm a los cuatro puntos de izquierda a derecha o de derecha a izquierda pero en este orden en el ESC. Y soldar los cables de batería + rojo y - negro y un capacitor de 1500uF al ESC donde también hay que soldar los cables de batería.

5. Soldar el conector al controlador de vuelo
Suelde los cables (rojo + y negro -) al conector Xt60 y luego vuelva a soldar esos dos cables a las almohadillas + y - del controlador de vuelo de acuerdo con el diagrama de instrucciones._cc781905-5cde-3194 - bb3b-136bad5cf58d_
¡Compruebe que ha soldado los cables en el lugar correcto!

Luego, debe conectar o soldar el cable de señal que viene con ESC desde el ESC al controlador de vuelo de acuerdo con el diagrama de instrucciones.

Si aún no se ha instalado una arandela de goma en el controlador de vuelo, deberá instalarla usted mismo.

Cuando haya soldado todas las piezas en el lugar correcto de acuerdo con el diagrama de instrucciones, puede deslizar el vuelo en el ESC entre los 4 tornillos.
¡Y comprueba que la flecha apunte al controlador de vuelo en la parte delantera del dron!

6. Instale el sistema analógico o el sistema digital con camera
Instale la cámara analógica en el soporte de la cámara de fibra de carbono con dos tornillos.

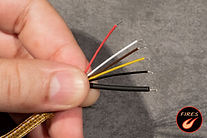
Luego coloque la montura de la cámara en el marco y corte los cables de la cámara con la longitud suficiente para soldar el amarillo, el rojo y el negro al controlador de vuelo de acuerdo con el diagrama de instrucciones.
Ahora tome el vtx y coloque cinta adhesiva de doble cara debajo para que pueda pegarlo al marco. Como consejo tambien arregla el vtx con dos de los 2mm cintas largas para que el vtx ciertamente no se suelte.
A continuación, debe soldar los cables del vtx al controlador de vuelo y hacerlo de acuerdo con el diagrama de instrucciones.
Conecte la antena vtx al vtx si no lo hace, existe una gran posibilidad de que pueda causar un cortocircuito en el vtx cuando conecte la batería al controlador de vuelo.
Conecte la antena vtx al espaciador trasero o debajo de la placa superior de fibra de carbono.


7. Instale el receptor
Suelde los cables del receptor de acuerdo con el diagrama de instrucciones al controlador de vuelo.

Fije las antenas del receptor con sus cables en la parte inferior de los brazos con los 2mm cintas largas con cremallera.

8. Revisa las piezas
¡Antes de conectar el controlador de vuelo a la batería Lipo, verifique con mucho cuidado que no haya residuos del pequeño estaño de soldadura entre las partes eléctricas que podrían causar un cortocircuito!
Para verificar si hay un cortocircuito, puede poner su multímetro en modo de continuidad y, si hay un cortocircuito, escuchará un sonido. Luego, debe revisar todo el diagrama y verificar que haya soldado todos los cables en el lugar correcto.

Recomiendo invertir en un tapón de humo porque es más conveniente que un multímetro y te ahorrará mucho dinero.

9. Conectar el transmisor al receptor
Primero debe presionar el botón en su receptor mientras conecta la alimentación y al mismo tiempo poner su transmisor en modo vinculante. El remitente y el receptor luego "hablan" entre sí. Puede ver esto porque la pequeña luz roja en el receptor cambia de rojo a verde. Entonces el receptor se conecta al transmisor. (Esta es una explicación para los receptores Flysky)
El método será diferente si usa un tipo diferente de transmisor con diferentes protocolos, entonces necesita encontrar el modelo de su transmisor en YouTube, vea una explicación en video.


Los pasos a seguir para programar tu drone Fpv
Ha conectado todas las piezas al marco y el dron se enciende cuando conecta la batería Lipo al controlador de vuelo.
Ahora tienes que programar el dron, el software que puedes usar es Betaflight.
¡No instales las hélices todavía!
Conectary Micro USB al controlador de vuelo y el USB a la computadora
Paso 1: Necesitas un cable Micro USB heen, luego conéctelo al controlador de vuelo y luego conecte el USB a su computadora. Si su computadora no emite ningún sonido, su cable no se ha utilizado correctamente. Luego haga clic en el botón amarillo de conexión.
Cuando el botón se vuelve rojo, su controlador de vuelo está conectado a Betaflight.
Instalar el nuevo firmware en el controlador de vueloallá
Paso 2:Si instala un nuevo firmware en su controlador de vuelo, hágalo de la siguiente manera. Ir
primero vaya a "CLI" y escriba la versión y verifique qué tipo de controlador de vuelo tiene. Presione desconectar y presione la luz intermitente del firmware. Luego presione "Elegir una tabla" y busque el nombre correcto de su controlador de vuelo. Luego presione "Elegir una versión de firmware" en la parte superior, presione "borrar chip completo" y presione "cargar firmware" y luego presione "flash firmware".
Betaflight eliminó todos los datos de su controlador de vuelo y ahora su controlador de vuelo entrará en DFU automáticamente y Betaflight instalará el último firmware para usted y tomará entre 20 y 30 segundos.
Pero si su controlador de vuelo no quiere entrar en DFU, hay un botón en su controlador de vuelo cuando lo presiona, mientras coloca ese micro-USB en su controlador de vuelo, Betaflight pone su controlador de vuelo en DFU automáticamente.
Calibre el acelerómetro
Paso 3: Presione el "botón de conexión" y asegúrese de que su dron Fpv esté colocado sobre una mesa nivelada. Vaya a la pestaña Configuración y luego presione "calibrar acelerómetro".
Puede instalar Betaflight aquí
Configurar el "audio inteligente" y el receptor
Paso 3.1: Aquí debe configurar el "audio inteligente" y el receptor. Para el receptor, vaya a la pestaña Puertos y habilite "Serial RX" para el UART, el receptor está conectado a su controlador de vuelo.
Y luego presione la pestaña Receptor y seleccione "Serie (a través de UART)" en la sección Receptor y elija el protocolo de su receptor en la sección "Proveedor de receptor serie".
Para el "audio inteligente", presione la pestaña Puertos, luego habilite "audio inteligente TBS" y luego presione "Guardar y reiniciar".
Active "Conexión automática" para que no tenga que presionar el botón "conectar" cada vez.
Copie y pegue los códigos en la pestaña CLI
Paso 3.2:Vaya a la pestaña CLI y copie y pegue estos códigos allí, para que pueda cambiar la configuración dentro del menú OSD en el vtx a través de sus gafas Fpv moviendo los dos joysticks de su transmisor en la dirección de las flechas rojas._cc781905-5cde -3194- bb3b-136bad5cf58d_
Pero si usa otro tipo de vtx, puede encontrar los códigos aquí.

Cuando mueva esos dos joystick, obtendrá un menú OSD en sus gafas Fpv y hará lo siguiente.
Seleccione la opción "Característica" moviendo el acelerador hacia abajo y luego hacia la derecha.

Ahora verá el menú "FUNCIONES".

Ahora verá el menú "VTX SA".
Seleccione la opción "VTX SA" moviendo el acelerador hacia abajo y luego hacia la derecha.

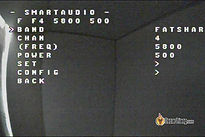
Ahora verá el menú "SAMRTAUDIO", ha ingresado a la configuración de vtx.
Seleccione la opción "BAND","CHAN" (Canal) o POWER si desea cambiarlos moviendo el acelerador hacia abajo y luego hacia la derecha.
Y para guardar todas las configuraciones seleccione "SET" y luego seleccione "Confirm"
Seleccione la configuración que desee en el menú OSD
Compruebe si el receptor funciona correctamente.
Etapa 4: Luego verifique si el receptor funciona correctamente en la sección "Receptor". Las barras (canales) deben moverse cuando mueva las palancas del transmisor. Si los canales incorrectos responden, intente con una configuración de canal diferente, como "predeterminado (AETR)" o "TAER"."

Configurar los motores
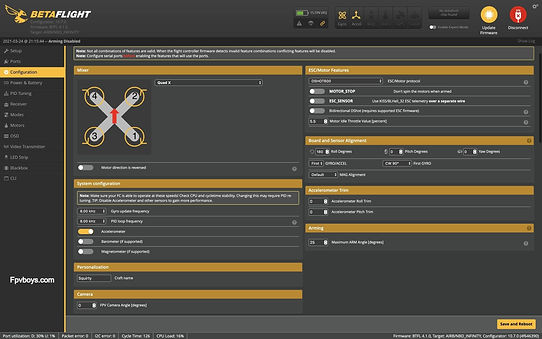
Paso 5:Presione la pestaña de configuración y vaya a la sección "ESCMotor Features" elija "DSHOT600" y para el "Motor Idle Throttle value [porcentaje]" elija 5.5.
En modo Armado cambia el 25 por 180 para poder usar el modo "Tortuga".
En resumen, el modo "Tortuga" te permite invertir los motores de tu dron usando el circuito de tu transmisor, que usas para voltear tu dron si se ha caído al revés.
Desplácese hacia abajo y vaya a la sección "Otras características" y habilite "AIRMODE","OSD","ANTGRAVITY" y DYNAMIC_FILTER. Y presione Guardar y reiniciar.
¡Compruebe que la flecha en el controlador de vuelo esté apuntando en la dirección correcta!
Paso 6: Controlarque la flecha en el controlador de vuelo apunta hacia el frente del dron, puede ver eso cuando presiona la pestaña Receptor y mira el modo Vista previa.
Pero si mueves el dron y el controlador de vuelo no está apuntando en la dirección correcta en Betaflight, puedes ajustar fácilmente la dirección en la pestaña de configuración a través del modo Board and Secor Alignement.

Escriba la configuración de la batería
Paso 7: Presione la pestaña Energía y batería, vaya a la sección Batería y cambie el "Voltaje de celda de advertencia" de 3.5 a 3.7 si es un principiante que le enviará un recordatorio haciendo un sonido a través del zumbador que tiene conectado a su controlador de vuelo. soldado.

Deje la configuración en la pestaña "Ajuste de PID"
Paso 8: En la pestaña PID-Tuning si es un principiante, le recomiendo dejar todos los Pids por defecto.

Configure el modo en el circuito en el transmisor
Paso 9: En la pestaña Modos, puede elegir qué circuito en su transmisor para su dron.
Para poder configurarlo, debe presionar el botón "Agregar rango" "ARM" y luego elegir un interruptor que le resulte más fácil encender y apagar con el dedo izquierdo.
Tienes que cambiar ese interruptor, entonces Betaflight lo detectará automáticamente y sabrá exactamente qué interruptor has movido.
Luego verá una barra amarilla y cuando mueva ese interruptor debería ver un pequeño punto amarillo. Si la barra amarilla coincide con el punto amarillo, significa que el dron se va a "armar".
El mismo método se aplica al otro modo que desea configurar.
Los otros modos que debería necesitar son: modo de ángulo, modo de horizonte, modo de aire y, por último, el modo Flip over after crash (modo tortuga).
Paso 10:¡No instales tus hélices todavía!
Ahora debe presionar la pestaña Motor para probar sus motores si están girando en la dirección correcta.
Así es como conectas tu batería lipo a tu controlador de vuelo y también conectas tu micro-USB a tu controlador de vuelo.
En el modo Motor en Betaflight, encienda "Entiendo los riesgos" y luego mueva el círculo azul "Maestro" hacia arriba un poco. Sus motores deberían comenzar a funcionar.
Puedes comprobarlo poniendo un trozo de cinta en la parte superior del motor donde tienes que colocar la hélice, entonces puedes ver en qué dirección están girando los motores. Y también comprobar que cada motor tiene el número correcto.
Comprobar si los motores giran en el sentido correcto


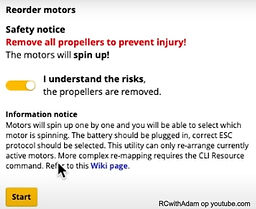
Pero en Betaflight 4.3, si no tiene los motores en el lugar correcto, puede cambiarlos a través del software. Para hacer eso, debe deshabilitar el "Entiendo los riesgos" circuit, luego presione "Reordenar motores". Recibirá un mensaje, luego presione "Entiendo los riesgos" nuevamente y presione "iniciar".
Recibirá un mensaje nuevamente escrito en la parte inferior ("Haga clic en el motor giratorio") y luego haga para cada motor.

Luego te dice en la parte inferior de "Listo Verifica el orden de giro del motor haciendo clic en la imagen". Luego presione el botón guardar. Ahora Betaflight reiniciará el dron y guardará todos los datos.
Ahora presione hacia atrás en la pestaña del motor y pruebe si los motores 1,2,3,4 están en el lugar correcto deslizando el círculo azul un poco hacia arriba para cada número.

Pero si sus motores tampoco giran en la dirección correcta, también puede ajustar la dirección de los motores a través de Betaflight.
Aquí se explica cómo ir a la sección del mezclador del motor, encender el interruptor y luego presionar "Guardar y reiniciar".

Vuelva a la pestaña Motor y desmarque "Entiendo los riesgos". Presione el botón "Dirección del motor".
Recibirá un mensaje, luego presione "Entiendo los riesgos" nuevamente y presione "Wirzard".

Te sale esta imagen presiona "Arrancar/girar motores".

Luego verá que esta imagen hace lo que se describe a continuación ("Haga clic en los números de motor individualmente para cambiar la dirección de giro Verifique que todos los motores estén girando correctamente").

Cuando haya terminado, presione "cerrar" y el controlador si todos los motores están girando en la dirección correcta colocando un trozo de cinta en la parte superior del motor donde debe colocar la hélice, puede ver en qué dirección están girando los motores.
Puede verlo moviendo el círculo azul "Maestro" hacia arriba un poco.
Paso 11: Para terminar la construcción de su Drone, tome cuatro tuercas de nailon y atornille su controlador de vuelo en esc.
Los últimos pasos para preparar el dron

Paso 11.1: Instale la parte superior de fibra de carbono plana en el marco y deslice un soporte de batería debajo también. También puede pegar esa "almohadilla de batería adhesiva Ummagrip" en esa placa superior para que la batería no se arrastre contra la escritura y ese reflujo no se escape.

Paso 11.2: Ahora finalmente puedes colocar tus cuatro hélices en los motores, pero asegúrate de colocarlas en el lugar correcto.
Asegúrelos todos con las cuatro tuercas M5 que vienen con los motores.
¡Pero no los atornilles demasiado!

¡Estás listo para volar tu primer dron, toma tu transmisor y tus gafas FPV y todas las baterías que tienes y sal afuera, toca un poco de hierba y explora el mundo chico o chica! 😉